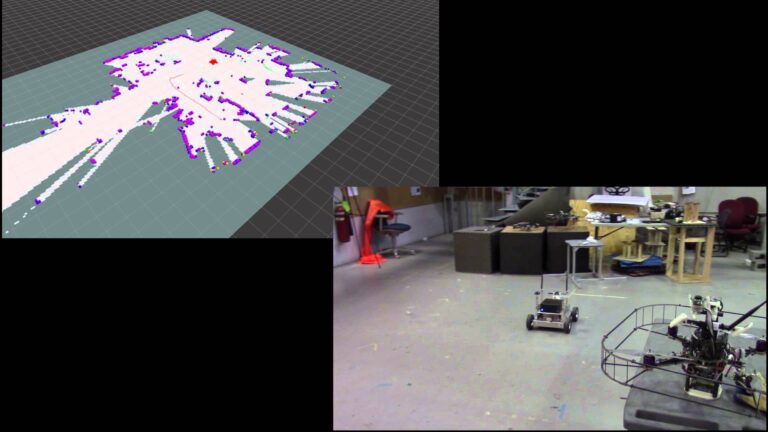
SLAM – Simultaneous Localisation and Mapping
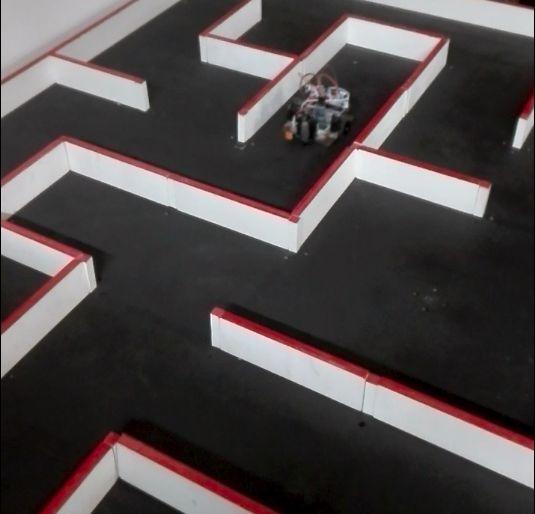
Jednym z najważniejszych celów stawianych robotom mobilnym jest autonomiczność. Roboty powinny wykonywać swoje zadania przy minimalnym udziale człowieka. Aktualnie jest to możliwe w bardzo ograniczony sposób. Środowisko pracy robota musi być specjalnie przygotowane i się nie zmieniać, a czynności muszą być powtarzalne. Te założenia są spełnione na przykład w halach produkcyjnych, gdzie roboty zastępują człowieka…