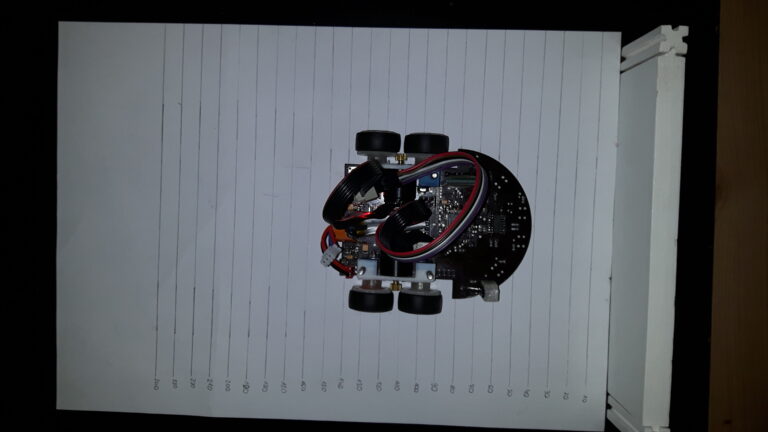
Kalibracja czujnika ściany
Czujnik ściany, którego zamontowanie i uruchomienie opisywałem poprzednio, daje pomiary w woltach wyrażonych w jednostkach ADC (zakres 0-4095 odpowiada 0 – 3.3 V). Taka wartość nie jest szczególnie przydatna, dopiero po konwersji na odległość w milimetrach może być wykorzystana do nawigacji w labiryncie.