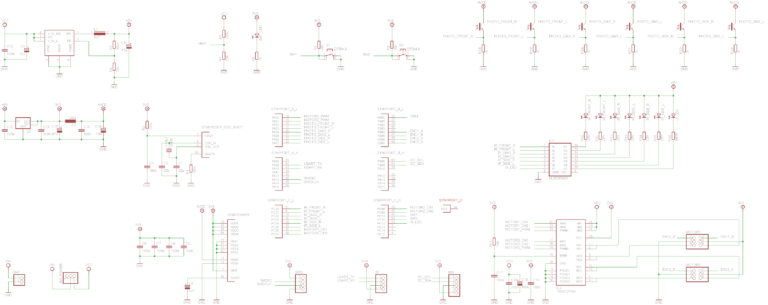
Projekt płytki drukowanej
Po zrobieniu schematu ideowego przyszła pora na projekt płytki PCB. Udało mi się uwinąć z tym zadaniem w weekend. W tym poście opiszę, czym się kierowałem przy projekcie PCB. Wymiary robota Pierwszym krokiem do stworzenia PCB było określenie wymiarów. Byłem tutaj ograniczony przez program Eagle, który wykorzystałem do zrobienia projektu. Maksymalny rozmiar płytki możliwy w…